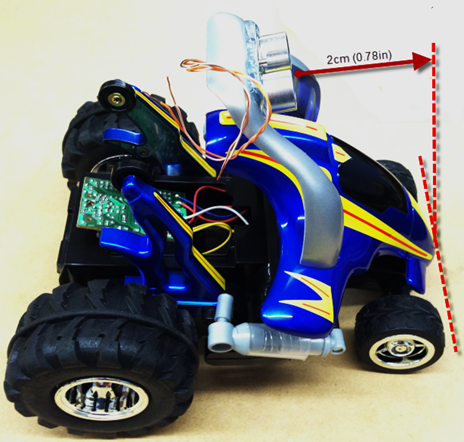
There she is. A beautifully hacked, piece of junk, remote control car. Earlier this month, 20 Wichita makers got together for a MakeICT workshop to learn how to do something cool with the Arduino microcontroller. The workshop, led by MakeICT member Ivan, taught us how to replace the cars on-board IC with an Arduino Nano to take control of the differential motors and then add a sonar device to provide information about the car’s surroundings as it moved. Ivan did an excellent job of explaining pulse width modulation, frequency, duty cycle, H-bridges, and basic sonar theory. By the end of the 4 hour workshop, the 10 cars were being controlled by the Arduino, negating the need for a remote, and when the sonar sensor told the car it was approaching an object, it would stop, back up, turn right, and continue forward.
Some of the challenges we experienced during the workshop were the inconsistency of the manufacturing of these cars. The boards inside the cars were different, some with surface mount components, some with through-hole components, and that required some attention on an individual basis to make sure each car would work. We also used extremely cheap AA batteries for the workshop which drained quickly. Next time we will invest in higher quality power sources!
Thanks to everyone who participated and a big thank you to Ivan who organized and led this workshop. He has put the details of the hack on his blog, including the Arduino code. Be sure to check it out!
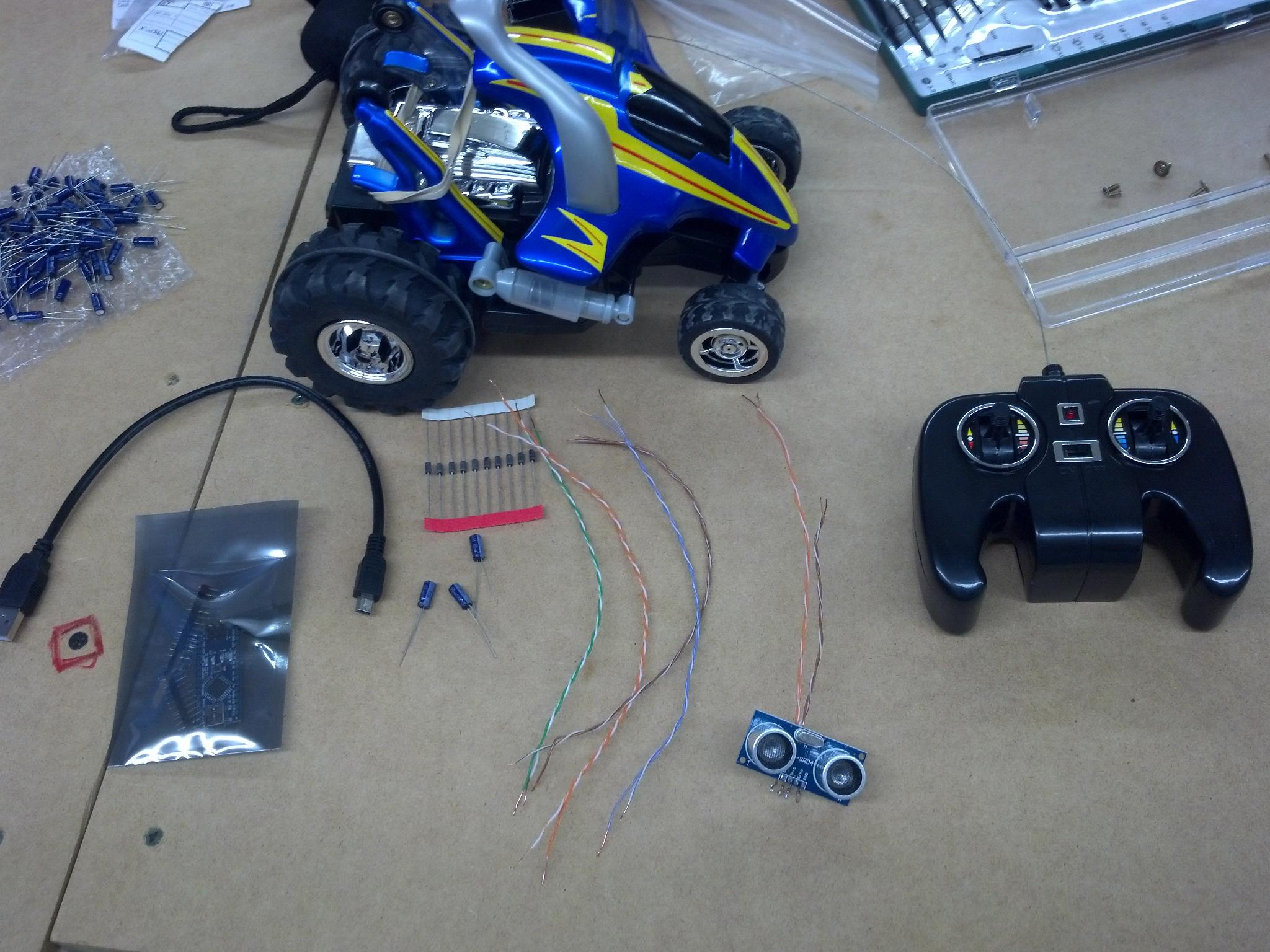
The kit for the MakeICT RC Arduino workshop.

Ivan educating us

Hacking the cars